ADAS高级驾驶辅助解决方案
荐
方案简介:
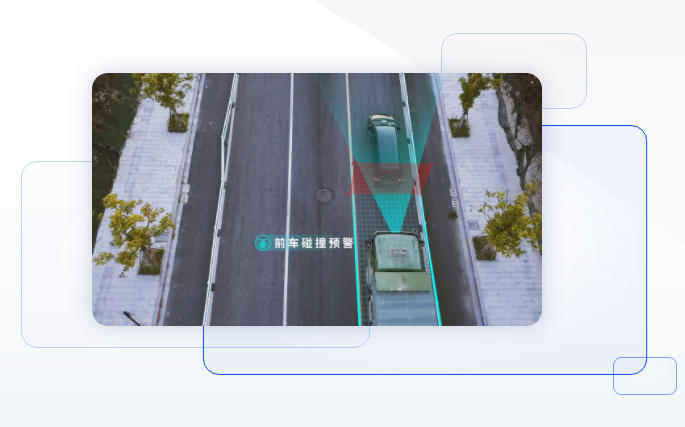
前车碰撞预警实时检测前方车辆,判断本车与前车之间的距离、方位及相对速度,当存在潜在碰撞危险时,进行提示引导驾驶者及时处理。技术原理通过前向图像输入,结合本车距离、方位及相对速度等参数,判断与前车距离是...
2025-12-17 发布
方案详情
vip专享文章,充值5元成为会员查看全文
前车碰撞预警
实时检测前方车辆,判断本车与前车之间的距离、方位及相对速度,当存在潜在碰撞危险时,进行提示引导驾驶者及时处理。
技术原理
通过前向图像输入,结合本车距离、方位及相对速度等参数,判断与前车距离是否处于碰撞危险范围。
车距过近预警
实时检测前方车辆,当与前车距离小于安全范围时,触发预警引导驾驶者及时处理。
技术原理
通过前向图像输入,判断本车与前车距离,若小于设置的安全距离则触发预警。
车道偏离预警
精准识别车道线,当车辆发生非主动性压线或偏离车道线的情况,系统及时预警,从而辅助安全驾驶。 可结合车速、偏离程度等维度定义不同等级的车道偏离预警。
技术原理
通过前向摄像头采集并识别行车道路线,计算自车与左右车道线距离,实时分析车辆位置是否在车道线内,及距离车道线的偏移程度。
行人碰撞预警
ADAS视觉子系统对车辆周围的行人进行识别,检测行人与车辆间的距离,并由此做出预警判定。一旦触发预警,系统会通过语音提醒司机及时采取措施,从而为安全驾驶提供辅助作用。
技术原理
通过前向摄像头,ADAS视觉子系统以行人为目标进行实时检测,判断其方位和距离,并实时跟踪,当检测到当检测车辆与行人距离存在潜在风险时及时进行提示预警。
产品优势
01
方案可兼容不同车型,能够在各种天气状况、道路情况、光线条件下稳定识别
02
响应速度迅捷,能够快速识别驾驶中的潜在危险,毫秒内极速响应、及时预警
03
算法精度表现出色,经大量场景数据训练,覆盖用例全面,运行稳定、鲁棒性强